add iir test
parent
ea70fcaa93
commit
70571fa290
|
|
@ -0,0 +1,6 @@
|
||||||
|
{
|
||||||
|
"files.associations": {
|
||||||
|
"filter.h": "c",
|
||||||
|
"coefs.h": "c"
|
||||||
|
}
|
||||||
|
}
|
||||||
Binary file not shown.
|
|
@ -0,0 +1,5 @@
|
||||||
|
cmake_minimum_required(VERSION 3.12)
|
||||||
|
project(iirfilter)
|
||||||
|
aux_source_directory(. SOURCE)
|
||||||
|
message("source " ${SOURCE})
|
||||||
|
add_executable(iirfilter ${SOURCE})
|
||||||
|
|
@ -0,0 +1,23 @@
|
||||||
|
TARGET = filter
|
||||||
|
|
||||||
|
HEADERS = $(wildcard *.h)
|
||||||
|
SRC = $(wildcard *.c)
|
||||||
|
OBJS = $(SRC:.c=.o)
|
||||||
|
|
||||||
|
CC = gcc
|
||||||
|
#CFLAGS = -Wall -std=gnu99
|
||||||
|
|
||||||
|
#can be deleted, .c can be translated to .o automatically
|
||||||
|
#use this to "@echo"
|
||||||
|
%.o:%.c
|
||||||
|
@$(CC) -g -o $@ -c $<
|
||||||
|
|
||||||
|
$(TARGET) : $(OBJS)
|
||||||
|
@$(CC) -g -o $@ $^
|
||||||
|
|
||||||
|
$(OBJS) : $(HEADERS)
|
||||||
|
|
||||||
|
.PHONY : clean
|
||||||
|
clean :
|
||||||
|
rm $(TARGET) $(OBJS)
|
||||||
|
|
||||||
|
|
@ -0,0 +1,64 @@
|
||||||
|
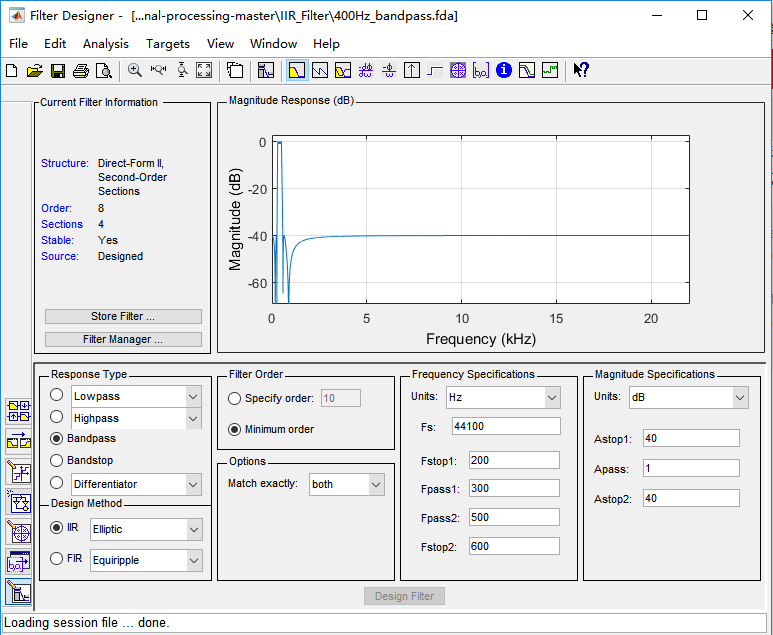
## An IIR filter designed with MATLAB and implemented in C
|
||||||
|
|
||||||
|
More details can be found in [my blog](https://www.cnblogs.com/lyrich/p/10987875.html).
|
||||||
|
|
||||||
|
The transfer function of a biquad filter can be written as: H(z)=(b₀+b₁z⁻¹+b₂z⁻²)/(a₀+a₁z⁻¹+a₂z⁻²).
|
||||||
|
|
||||||
|
Use Filter Designer in MATLAB to design a 400 Hz bandpass IIR filter:
|
||||||
|
|
||||||
|
|
||||||
|
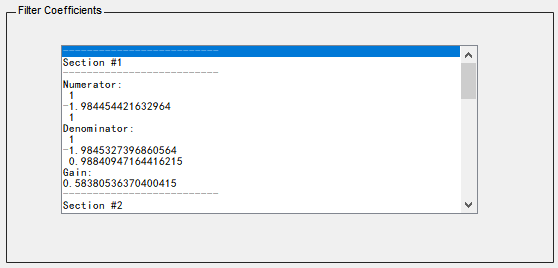
Analysis->Filter Coeffients :
|
||||||
|
|
||||||
|
Numerator,from top to bottom: b₀,b₁ and b₂.
|
||||||
|
Denominator, from top to bottom: a₀,a₁ and a₂,a₀ is always 1.
|
||||||
|
|
||||||
|
Use arrays to store filter coeffients:
|
||||||
|
```c
|
||||||
|
//8-order IIR filter with 4 sections
|
||||||
|
const int sections = 4;
|
||||||
|
|
||||||
|
//nominator
|
||||||
|
const float b[4][3] = {
|
||||||
|
{ 1, -1.984454421, 1 },
|
||||||
|
{ 1, -1.999405318, 1 },
|
||||||
|
{ 1, -1.993167556, 1 },
|
||||||
|
{ 1, -1.998644244, 1 }
|
||||||
|
};
|
||||||
|
|
||||||
|
//denominator
|
||||||
|
const float a[4][3] = {
|
||||||
|
{ 1, -1.984532740, 0.9884094716 },
|
||||||
|
{ 1, -1.988571923, 0.9909378613 },
|
||||||
|
{ 1, -1.991214225, 0.9962624248 },
|
||||||
|
{ 1, -1.995917854, 0.9977478940 }
|
||||||
|
};
|
||||||
|
|
||||||
|
const float gain[4] = { 0.583805364, 0.583805364, 0.170388576, 0.170388576 };
|
||||||
|
```
|
||||||
|
|
||||||
|
Store filter states:
|
||||||
|
```c
|
||||||
|
float w[sections][2]; //filter states
|
||||||
|
```
|
||||||
|
|
||||||
|
Initialize filter:
|
||||||
|
```c
|
||||||
|
for (int i = 0; i < sections; i++) {
|
||||||
|
w[i][0] = 0; //w[n-1]
|
||||||
|
w[i][1] = 0; //w[n-2]
|
||||||
|
}
|
||||||
|
```
|
||||||
|
|
||||||
|
Calculate filter output:
|
||||||
|
```c
|
||||||
|
y[0] = pcmIn[i];
|
||||||
|
for (j = 0; j < sections; j++) {
|
||||||
|
tmp[j] = y[j] - a[j][1] * w[j][0] - a[j][2] * w[j][1]; //calculate w[n]
|
||||||
|
y[j+1] = tmp[j] + b[j][1] * w[j][0] + b[j][2] * w[j][1]; //calculate the j-th section filter output y[n]
|
||||||
|
w[j][1] = w[j][0]; //move w[n-1] -> w[n-2]
|
||||||
|
w[j][0] = tmp[j]; //move w[n] -> w[n-1]
|
||||||
|
y[j+1] = gain[j] * y[j+1]; //multiply with gain
|
||||||
|
}
|
||||||
|
|
||||||
|
out = y[j];
|
||||||
|
```
|
||||||
|
|
@ -0,0 +1,107 @@
|
||||||
|
#include "coefs.h"
|
||||||
|
|
||||||
|
const int sections = 4;
|
||||||
|
|
||||||
|
const float b[4][3] = {
|
||||||
|
{ 1, -1.984454421, 1 },
|
||||||
|
{ 1, -1.999405318, 1 },
|
||||||
|
{ 1, -1.993167556, 1 },
|
||||||
|
{ 1, -1.998644244, 1 }
|
||||||
|
};
|
||||||
|
|
||||||
|
//denominator
|
||||||
|
const float a[4][3] = {
|
||||||
|
{ 1, -1.984532740, 0.9884094716 },
|
||||||
|
{ 1, -1.988571923, 0.9909378613 },
|
||||||
|
{ 1, -1.991214225, 0.9962624248 },
|
||||||
|
{ 1, -1.995917854, 0.9977478940 }
|
||||||
|
};
|
||||||
|
|
||||||
|
const float gain[4] = { 0.583805364, 0.583805364, 0.170388576, 0.170388576 };
|
||||||
|
|
||||||
|
|
||||||
|
#define MWSPT_NSEC 13
|
||||||
|
const int NL[MWSPT_NSEC] = { 1,3,1,3,1,3,1,3,1,3,1,3,1 };
|
||||||
|
const float NUM[MWSPT_NSEC][3] = {
|
||||||
|
{
|
||||||
|
0.01416839943433, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, -1
|
||||||
|
},
|
||||||
|
{
|
||||||
|
0.01416839943433, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, -1
|
||||||
|
},
|
||||||
|
{
|
||||||
|
0.01061464435972, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, -1
|
||||||
|
},
|
||||||
|
{
|
||||||
|
0.01061464435972, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, -1
|
||||||
|
},
|
||||||
|
{
|
||||||
|
0.005015094751417, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, -1
|
||||||
|
},
|
||||||
|
{
|
||||||
|
0.005015094751417, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, -1
|
||||||
|
},
|
||||||
|
{
|
||||||
|
0.8912509381337, 0, 0
|
||||||
|
}
|
||||||
|
};
|
||||||
|
const int DL[MWSPT_NSEC] = { 1,3,1,3,1,3,1,3,1,3,1,3,1 };
|
||||||
|
const float DEN[MWSPT_NSEC][3] = {
|
||||||
|
{
|
||||||
|
1, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, -1.992740305702, 0.9977910469633
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, -1.996837669615, 0.9986690342012
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, -1.989872067756, 0.9942825585574
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, -1.993969383703, 0.9960603774853
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, -1.989477089804, 0.9929580678414
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, 0
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, -1.991214772896, 0.9938596848053
|
||||||
|
},
|
||||||
|
{
|
||||||
|
1, 0, 0
|
||||||
|
}
|
||||||
|
};
|
||||||
|
|
@ -0,0 +1,15 @@
|
||||||
|
#ifndef _COEFS_H
|
||||||
|
#define _COEFS_H
|
||||||
|
|
||||||
|
//8-order IIR filter with 4 sections
|
||||||
|
extern const int sections;
|
||||||
|
|
||||||
|
//nominator
|
||||||
|
extern const float b[4][3];
|
||||||
|
|
||||||
|
//denominator
|
||||||
|
const float a[4][3];
|
||||||
|
|
||||||
|
const float gain[4];
|
||||||
|
|
||||||
|
#endif
|
||||||
|
|
@ -0,0 +1,38 @@
|
||||||
|
#include "coefs.h"
|
||||||
|
#include "filter.h"
|
||||||
|
|
||||||
|
void filter_reset(float w[][2])
|
||||||
|
{
|
||||||
|
for (int i = 0; i < sections; i++) {
|
||||||
|
w[i][0] = 0;
|
||||||
|
w[i][1] = 0;
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
void filter(short* pcmIn, short* pcmOut, float w[][2], int sample_size)
|
||||||
|
{
|
||||||
|
float y[sections+1], tmp[sections], out;
|
||||||
|
int i,j;
|
||||||
|
|
||||||
|
for (i = 0; i < sample_size; i++) {
|
||||||
|
y[0] = pcmIn[i];
|
||||||
|
for (j = 0; j < sections; j++) {
|
||||||
|
tmp[j] = y[j] - a[j][1] * w[j][0] - a[j][2] * w[j][1]; //calculate w[n]
|
||||||
|
y[j+1] = tmp[j] + b[j][1] * w[j][0] + b[j][2] * w[j][1]; //calculate the j-th section filter output y[n]
|
||||||
|
w[j][1] = w[j][0]; //move w[n-1] -> w[n-2]
|
||||||
|
w[j][0] = tmp[j]; //move w[n] -> w[n-1]
|
||||||
|
y[j+1] = gain[j] * y[j+1]; //multiply with gain
|
||||||
|
}
|
||||||
|
|
||||||
|
out = y[j];
|
||||||
|
|
||||||
|
if (out > 32767)
|
||||||
|
out = 32767;
|
||||||
|
|
||||||
|
if (out < -32768)
|
||||||
|
out = -32768;
|
||||||
|
|
||||||
|
pcmOut[i] = (short)(out);
|
||||||
|
}
|
||||||
|
}
|
||||||
|
|
||||||
|
|
@ -0,0 +1,25 @@
|
||||||
|
#ifndef _FILTER_H
|
||||||
|
#define _FILTER_H
|
||||||
|
|
||||||
|
//WAVE PCM soundfile format
|
||||||
|
typedef struct
|
||||||
|
{
|
||||||
|
char chunk_id[4];
|
||||||
|
int chunk_size;
|
||||||
|
char format[4];
|
||||||
|
char subchunk1_id[4];
|
||||||
|
int subchunk1_size;
|
||||||
|
short int audio_format;
|
||||||
|
short int num_channels;
|
||||||
|
int sample_rate; //sample_rate denotes the sampling rate.
|
||||||
|
int byte_rate;
|
||||||
|
short int block_align;
|
||||||
|
short int bits_per_sample;
|
||||||
|
char subchunk2_id[4];
|
||||||
|
int subchunk2_size; //subchunk2_size denotes the number of samples.
|
||||||
|
} wav_header;
|
||||||
|
|
||||||
|
void filter_reset(float w[][2]);
|
||||||
|
void filter(short* pcmIn, short* pcmOut, float w[][2], int sample_size);
|
||||||
|
|
||||||
|
#endif
|
||||||
Binary file not shown.
|
|
@ -0,0 +1,36 @@
|
||||||
|
#include <stdio.h>
|
||||||
|
#include "filter.h"
|
||||||
|
#include "coefs.h"
|
||||||
|
#define WSIZE 512
|
||||||
|
|
||||||
|
short bufferIn[WSIZE] = {0};
|
||||||
|
short bufferOut[WSIZE] = {0};
|
||||||
|
|
||||||
|
int main()
|
||||||
|
{
|
||||||
|
FILE * fp_in, *fp_out;
|
||||||
|
int i = 0, nb;
|
||||||
|
wav_header wav_header_buf;
|
||||||
|
|
||||||
|
float w[sections][2]; //filter states
|
||||||
|
|
||||||
|
fp_in = fopen("in.wav", "rb");
|
||||||
|
fp_out = fopen("out.wav", "wb");
|
||||||
|
|
||||||
|
fread(&wav_header_buf, 1, sizeof(wav_header), fp_in);
|
||||||
|
fwrite(&wav_header_buf,1, sizeof(wav_header), fp_out);
|
||||||
|
|
||||||
|
while (!feof(fp_in)) {
|
||||||
|
|
||||||
|
nb = fread(bufferIn, 2, WSIZE, fp_in);
|
||||||
|
|
||||||
|
filter_reset(w);
|
||||||
|
filter(bufferIn, bufferOut, w, WSIZE);
|
||||||
|
|
||||||
|
fwrite(bufferOut, 2, nb, fp_out); //writing read data into output file
|
||||||
|
}
|
||||||
|
|
||||||
|
printf("completed\n");
|
||||||
|
|
||||||
|
return 0;
|
||||||
|
}
|
||||||
Binary file not shown.
Loading…
Reference in New Issue